热点资讯
创新科技传动设备伺服式DH042L2-28-8-30高转速伺服减速器
文章来源:ymcdkj
发布时间:2024-04-28 18:39:38
-30高转速伺服减速器
淋浴、浴缸 :购暗装 后,一般要把 的阀芯预埋在墙内。预埋前一定要注重卫生间墙体的厚度。墙体太薄的话,阀芯将无法预埋。预埋时阀芯的塑料保护罩不要轻易摘除,以免在预埋时水泥和其他杂务损坏阀芯。另外在预埋阀芯时还应该注重一下阀芯的上下、左右的方向,以免阀芯埋错。墙装 预埋进水管时尺寸有偏差,可采用可用调节拐子进行校位。恒温 的恒温 之前,请您先检查一下水管是不是左热右冷,切记不要将冷热水管接错,以免 不能正常工作。
创新科技传动设备:伺服式DH042L2-28-8-30高转速伺服减速器
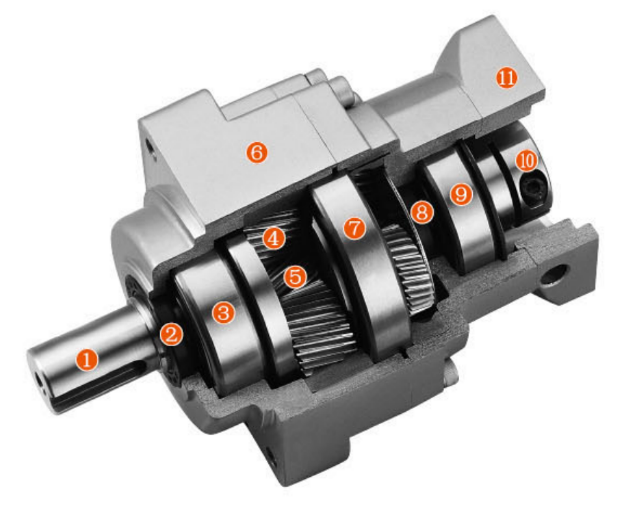
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组 向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
创新科技 转速伺服减速器
3.2 电气环境 3.2.1 防止电磁波干扰。变频器在工作中由于整流和变频,周围产生了很多的干扰电磁波,这些高频电磁波对附近的仪表、仪器有一定的干扰。因此,柜内仪表和电子系统,应该选用金属外壳,屏蔽变频器对仪表的干扰。所有的元器件均应可靠接地,除此之外,各电气元件、仪器及仪表之间的连线应选用屏蔽控制电缆,且屏蔽层应接地。如果不好电磁干扰,往往会使整个系统无法工作,导致控制单元失灵或损坏。 3.2.2 防止输入端过电压。变频器电源输入端往往有过电压保护,但是,如果输入端高电压作用时间长,会使变频器输入端损坏。因此,在实际运用中,要核实变频器的输入电压、单相还是三相和变频器使用额定电压。特别是电源电压极不稳定时要有稳压设备,否则会造成严重后果。 三、接地 变频器正确接地是提高控制系统灵敏度、噪声能力的重要手段,变频器接地端子E(G)接地电阻越小越好,接地导线截面积应不小于2mm2,长度应控制在20m以内。变频器的接地必须与动力设备接地点分,不能共地。信号输入线的屏蔽层,应接至E(G)上,其另一端绝不能接于地端,否则会引起信号变化波动,使系统振荡不止。变频器与控制柜之间应电气连通,如果实际有困难,可利用铜芯导线跨接。
行星齿轮箱即行星减速器又叫行星减速机,其结构都是多个行星齿轮围绕一个太阳齿转动的机构,也是将传动速比降低,同时又将电机扭力成比例增大的机构。行星齿轮箱的优点:
1、体积小、质量小,结构紧凑,承载能力大;在一般承受相同的载荷条件下,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2~1/5。
2、传动效率高;由于行星齿轮传动结构的对称性,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。一般其效率值可达0.97~0.99。
3、传动比较大;在仅作为传递运动的行星齿轮传动中,其传动比可达到几千。而且行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。
4、运动平稳、抗冲击和振动的能力较强;由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的受力平衡。同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。
创新科技 转速伺服减速器
+ W -120-S2-P2
轴承型号的选择:轴承型号一般是由用户的技术人员根据配套产品的使用条件及承受负荷对FAG进口轴承进行选择。业务人员主要了解用户的实际负荷是否与所选轴承相符合,如果轴承达不到使用要求,应尽快建议客户改选型号,但除非特殊产品在选择型号上一般不会有什么问题。油脂的选择:油脂的选择一般是根据轴承的转速、耐温情况、噪音要求及起动力矩等方面进行选择,要求业务人员对各种油脂的性能很了解。轴承配合的选择,滚动轴承的内径尺寸和外径尺寸是按标准公差的,轴承内圈与轴,外圈与座孔的配合松紧程度只能通过控制轴颈的公差和座孔的公差来实现。